2024-08-13 14:31:01
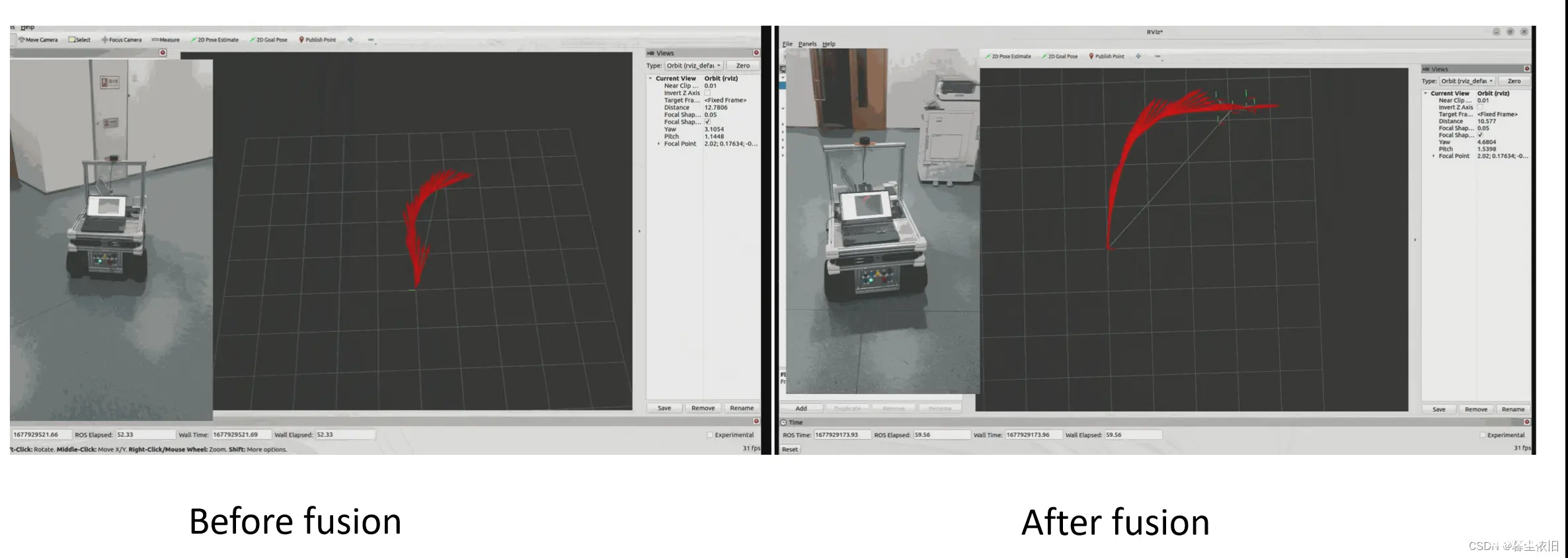
本文介绍了如何在ROS2系统中,通过robot_localization包融合IMU和里程计数据,以提高cartographer的建图精度和稳定性。文章详细阐述了从数据接收、发布到融合的流程,并提供了相关配置参...
浏览 50 次 标签: ROS2+cartographer+激光雷达+IMU里程计数据融合(robot_locazation) 建图
阅读排行
- 秦深钟时夏继承遗产后,我包养了顶流影帝无删减(秦深钟时夏:继承遗产后,我包养了顶流影帝结局+番外)全文免费阅读无弹窗大结局_秦深钟时夏继承遗产后,我包养了顶流影帝完本小说全章节阅读(秦深钟时夏:继承遗产后,我包养了顶流影帝结局+番外)
- 小说谢清梨江应森 5 土豆猫小说精彩章节在线阅读
- 温书仪段淮川全文阅读 可爱小桃罐小说全本无弹窗
- 小说李寒松温雪曼在线阅读 局部宇宙小说精彩章节在线阅读
- 【抖音】《罗俏俏卫衡》佚名免费试读 新书《罗俏俏卫衡》小说全集阅读
- 【抖音】《陈源李明猫》猫鱼书免费试读 (猫鱼书)小说全集免费在线阅读
- 季思言乔心茹(乔心茹季思言)全文免费阅读无弹窗大结局_(季思言乔心茹)乔心茹季思言最新章节列表_笔趣阁
- 安安的出院倒计时写的小说《林乔傅嘉年傅礼安安》佚名全文阅读 佚名小说精彩章节在线阅读
- 霍衍白薇薇连清全本章节阅读 霍衍白薇薇连清小说全文在线阅读
热门文章
名师推荐
- (精品)谢清梨江应森小说 2 土豆猫小说精彩章节在线阅读
- 我的心在他胸腔跳动:结局+番外(江宴修夏南絮:结局+番外小说)全文免费阅读无弹窗大结局_ 我的心在他胸腔跳动:结局+番外全文免费阅读小说江宴修夏南絮:结局+番外全文免费阅读最新章节列表_笔趣阁(我的心在他胸腔跳动:结局+番外小说)
- 兮宁 第4章 新书《陈南星陈南汐》小说全集阅读
- 罗俏俏卫衡by罗俏俏卫衡竹马第五章 小说全集免费在线阅读(佚名)
- 一拳一个小红帽 第一章 孟凡臣叶倾城小说全文免费阅读
- 闪婚后,祁先生他天天被钓成翘嘴写的小说《宁染祁薄寒》甜甜疯了全文阅读 甜甜疯了小说精彩章节在线阅读
- 完结文乔心茹季思言季思言乔心茹最新章节列表_完结文乔心茹季思言全文免费阅读(季思言乔心茹)
- 此恨绵绵无绝期(钟婉清时亦寒)全文免费阅读无弹窗大结局_(钟婉清时亦寒)此恨绵绵无绝期最新章节列表_笔趣阁
- 【抖音】热书孟凡臣叶倾城全本章节阅读 孟凡臣叶倾城小说全文免费阅读